
Bence H.
—
Creative Designer

Product Design Projects
Recents
Bence's Starter Team
All Projects






Supervised Autonomy for Subsea Robots
B
100%
Jan 1, 2025
Supervised Autonomy for Subsea Robots
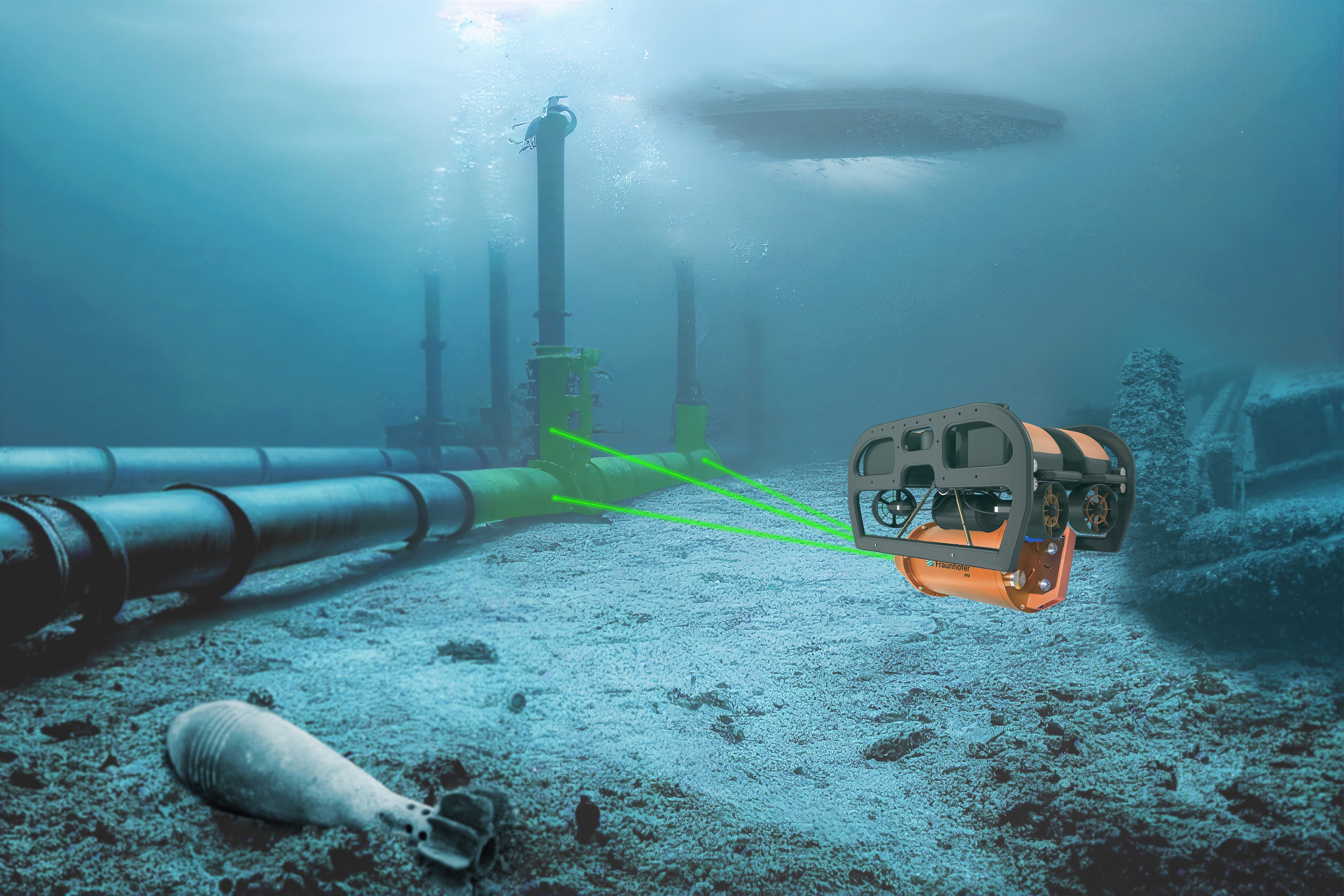
I worked on designing the user experience for supervising autonomous underwater robots used in offshore inspection and survey missions. The goal was to transform complex robotics systems into clear, trustworthy interfaces that allow operators to plan and supervise autonomous missions instead of manually piloting vehicles. The platform combines AI perception, navigation, and robotics control to enable progressive levels of autonomy in subsea operations.

Category
Digital Product Design
Reading Time
10 Min
Date
The Challenge
Traditional subsea operations rely on manual control of remotely operated vehicles (ROVs).
Pilots must simultaneously:
monitor multiple sensor feeds
manually control vehicle movement
interpret complex subsea environments
As autonomy becomes possible, the operator’s role shifts from pilot → mission supervisor.
This creates a major UX challenge:
How do we design interfaces that allow humans to trust and supervise autonomous robots operating in complex environments?
My Role
Product Designer — Autonomy Systems
I worked closely with product managers, robotics engineers, and domain experts to translate autonomy technology into usable workflows.
My work included:
defining the UX vision for autonomy
designing mission planning and monitoring workflows
facilitating cross-team workshops
aligning UX with robotics architecture and product strategy
documenting the mission management UX for the autonomy platform
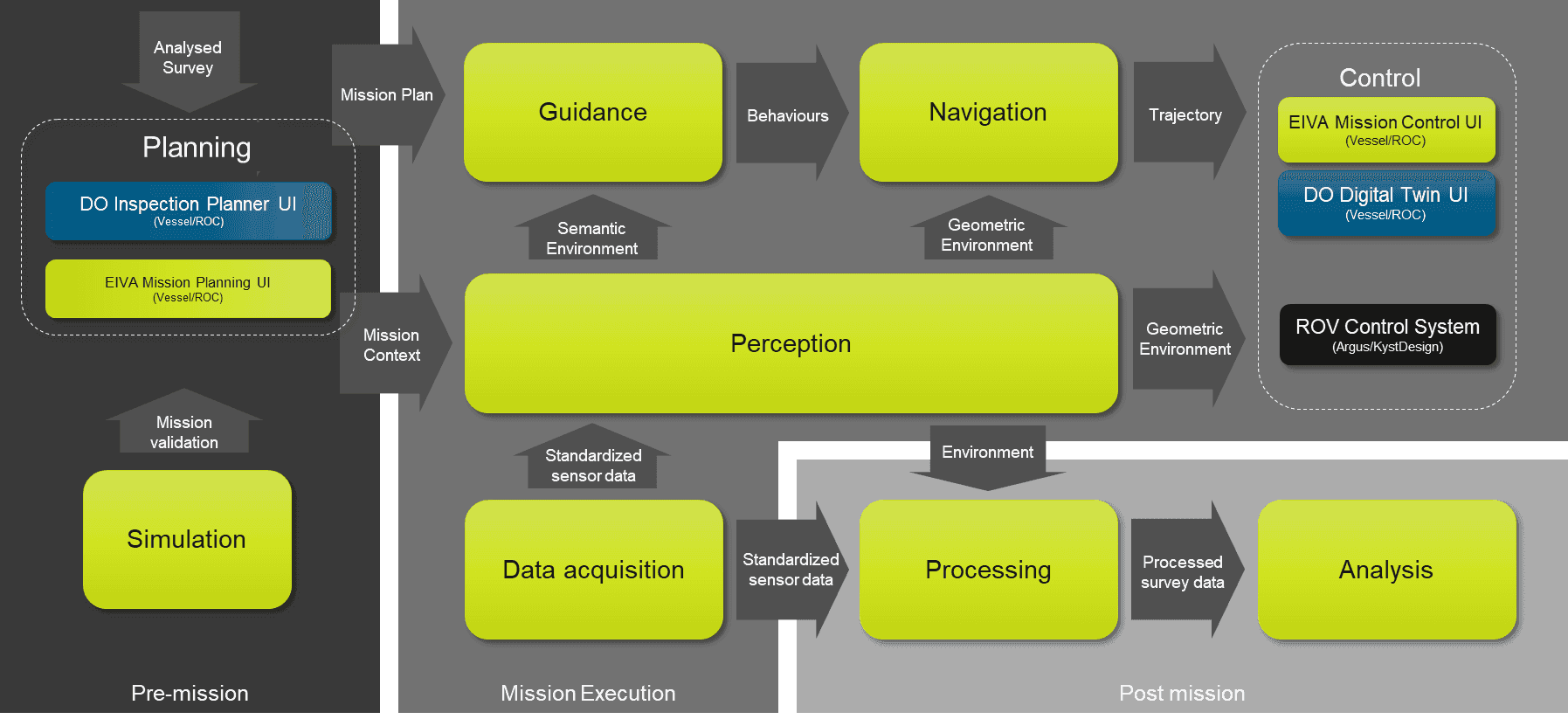
Understanding the System
The autonomy system is built around four core components:
Perception
Sensors and AI map the environment and estimate the robot’s position. Through SLAM (Simultaneous Localization and Mapping) the system continuously estimates its position and builds a map of the environment.Guidance
The decision engine that selects behaviours based on mission goals. It executes missions using behaviour trees, selecting actions based on the mission goal and sensor data.Navigation
Converts mission logic into vehicle movementVehicle Interface
Connects the autonomy system to the robot’s control system.
Understanding this architecture allowed me to design interfaces that expose system logic without overwhelming the operator.
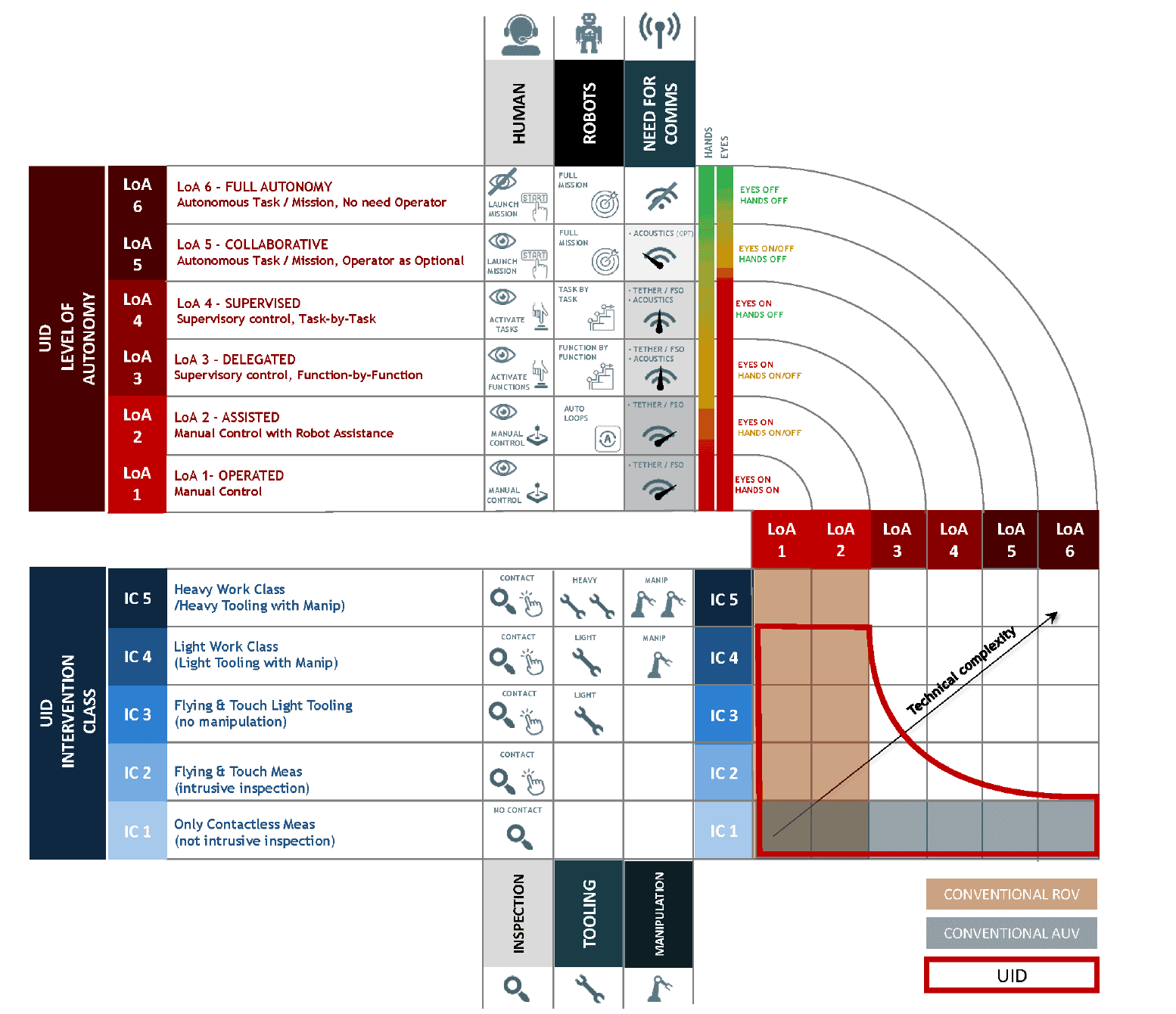
The roadmap aims to reach Level 4 supervised autonomy, where robots execute missions while humans supervise and intervene only when necessary.
Process
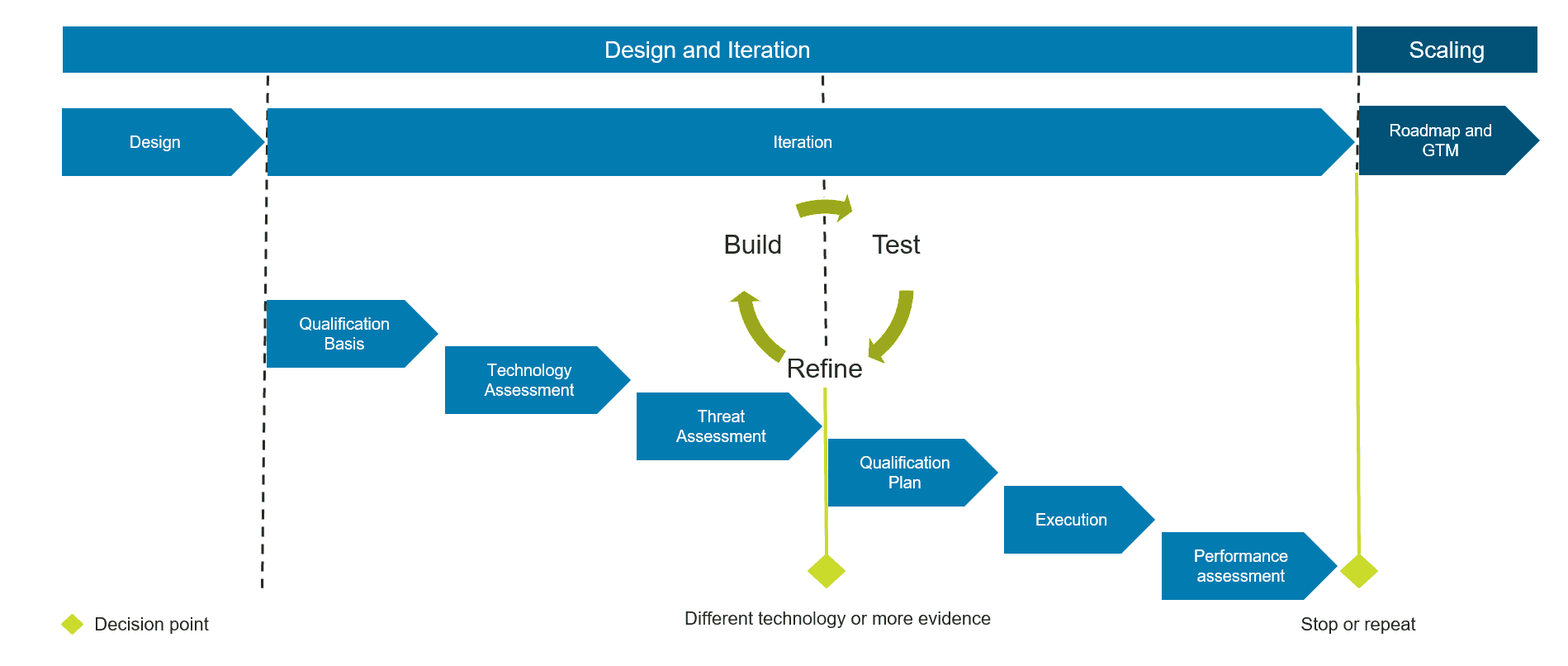
UX Vision
The UX strategy focused on reducing cognitive load while maintaining human oversight.
Key principles:
Mission-centric UI
Design around mission goals instead of system internals.
Transparency
Operators should always know what the robot is doing and why.
Human-in-the-loop autonomy
Operators supervise missions and can intervene anytime.
Progressive complexity
Simple tasks are easy to start, advanced control remains available.
Designing Mission Management (NDA)
A key part of my work was defining the Mission Management System.
This interface allows operators to:
plan inspection missions
monitor robot behaviour
understand system decisions
intervene when necessary
The system connects mission planning, execution, monitoring, and post-mission analysis into one workflow.
Mission Planning
Operators define missions using reusable behaviour blocks such as:
go to waypoint
follow pipeline
maintain distance from asset
inspect structure
re-inspect if quality is insufficient
These behaviours are composed into larger mission workflows.
This modular structure allows complex missions to be built without coding.
Policy-Driven Autonomy
A key concept I worked with was policy-based mission logic.
Instead of hardcoding behaviour, the system follows policies such as:
slow down near structures
maintain a minimum distance to assets
avoid restricted zones
Policies allow missions to adapt dynamically to the environment while maintaining safety.
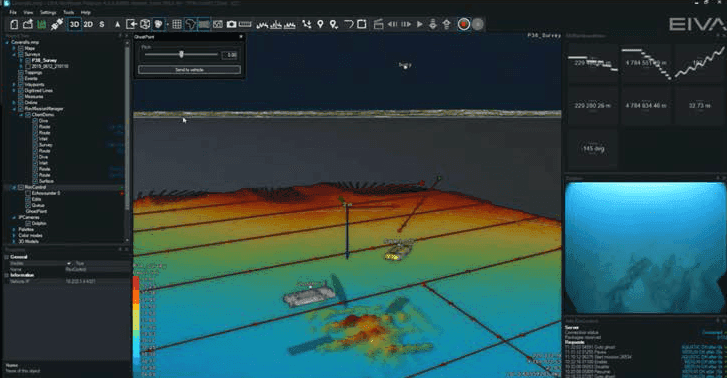
Mission Monitoring
Another key UX challenge was making autonomy observable.
Operators must be able to answer questions like:
Where is the robot?
What is it doing right now?
What will it do next?
Why did it change behaviour?
The monitoring interface therefore exposes:
robot location and trajectory
active mission behaviour
system state and sensor confidence
alerts and policy triggers
This creates trust and situational awareness, which are critical when supervising autonomous robots.
Impact
The work contributed to the foundation of the EIVA Autonomy System, enabling:
supervised robotic inspection missions
perception-driven navigation
scalable autonomy across subsea robots
The roadmap aims to reach Level 4 supervised autonomy, where robots execute missions while humans supervise and intervene only when necessary.






About Me


